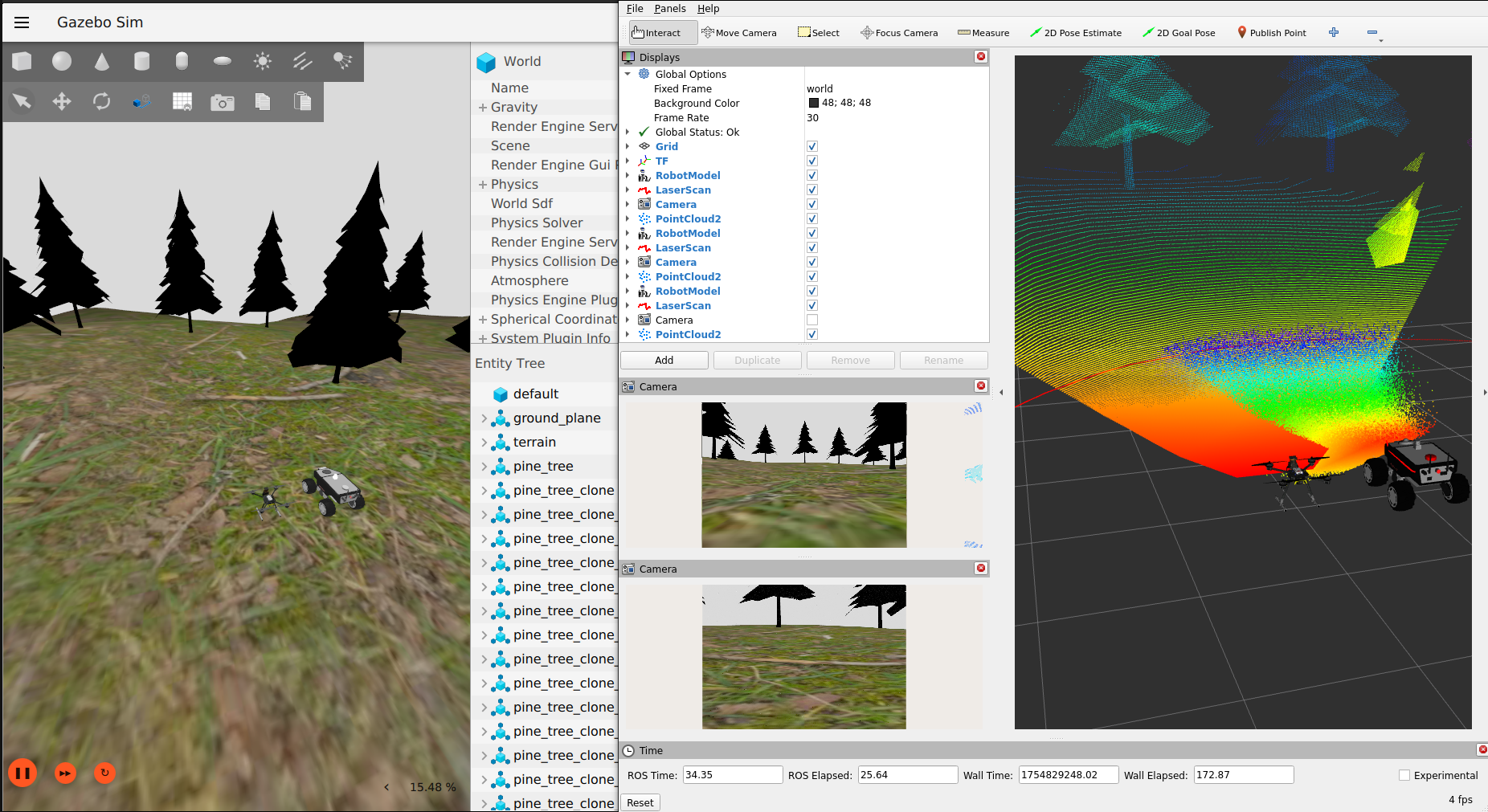
During my internship at the CRIStAL laboratory, I developed a simulation platform for a heterogeneous fleet of aerial and ground robots. The core objective was to create a robust and portable simulator running on Ubuntu 22.04 with ROS Humble inside a Docker container, designed to test autonomy algorithms for Robotnik Summit XL vehicles and PX4 drones in a forested environment with complex terrain.
→ Link to the youtube video showing the simulated robots controlled by teleoperation : https://www.youtube.com/watch?v=hmHdJOd_0iw
→ Link to the github repository of the project : https://github.com/Adrien420/multirobots_sim